ਵਾਯੂਮੰਡਲ ਖੋਜ ਵਿਧੀਆਂ
ਵਾਯੂਮੰਡਲੀ ਖੋਜ ਦੇ ਮੁੱਖ ਤਰੀਕੇ ਹਨ: ਮਾਈਕ੍ਰੋਵੇਵ ਰਾਡਾਰ ਸਾਊਂਡਿੰਗ ਵਿਧੀ, ਏਅਰਬੋਰਨ ਜਾਂ ਰਾਕੇਟ ਸਾਊਂਡਿੰਗ ਵਿਧੀ, ਸਾਊਂਡਿੰਗ ਬੈਲੂਨ, ਸੈਟੇਲਾਈਟ ਰਿਮੋਟ ਸੈਂਸਿੰਗ, ਅਤੇ LIDAR। ਮਾਈਕ੍ਰੋਵੇਵ ਰਾਡਾਰ ਛੋਟੇ ਕਣਾਂ ਦਾ ਪਤਾ ਨਹੀਂ ਲਗਾ ਸਕਦਾ ਕਿਉਂਕਿ ਵਾਯੂਮੰਡਲ ਵਿੱਚ ਭੇਜੇ ਗਏ ਮਾਈਕ੍ਰੋਵੇਵ ਮਿਲੀਮੀਟਰ ਜਾਂ ਸੈਂਟੀਮੀਟਰ ਤਰੰਗਾਂ ਹਨ, ਜਿਨ੍ਹਾਂ ਦੀ ਤਰੰਗ-ਲੰਬਾਈ ਲੰਬੀ ਹੁੰਦੀ ਹੈ ਅਤੇ ਛੋਟੇ ਕਣਾਂ, ਖਾਸ ਕਰਕੇ ਵੱਖ-ਵੱਖ ਅਣੂਆਂ ਨਾਲ ਪਰਸਪਰ ਪ੍ਰਭਾਵ ਨਹੀਂ ਪਾ ਸਕਦੇ।
ਹਵਾ ਰਾਹੀਂ ਅਤੇ ਰਾਕੇਟ ਰਾਹੀਂ ਆਵਾਜ਼ ਕੱਢਣ ਦੇ ਤਰੀਕੇ ਵਧੇਰੇ ਮਹਿੰਗੇ ਹੁੰਦੇ ਹਨ ਅਤੇ ਲੰਬੇ ਸਮੇਂ ਲਈ ਨਹੀਂ ਦੇਖੇ ਜਾ ਸਕਦੇ। ਹਾਲਾਂਕਿ ਗੁਬਾਰਿਆਂ ਨੂੰ ਆਵਾਜ਼ ਕੱਢਣ ਦੀ ਲਾਗਤ ਘੱਟ ਹੁੰਦੀ ਹੈ, ਪਰ ਉਹ ਹਵਾ ਦੀ ਗਤੀ ਤੋਂ ਵਧੇਰੇ ਪ੍ਰਭਾਵਿਤ ਹੁੰਦੇ ਹਨ। ਸੈਟੇਲਾਈਟ ਰਿਮੋਟ ਸੈਂਸਿੰਗ ਔਨ-ਬੋਰਡ ਰਾਡਾਰ ਦੀ ਵਰਤੋਂ ਕਰਕੇ ਵੱਡੇ ਪੱਧਰ 'ਤੇ ਗਲੋਬਲ ਵਾਯੂਮੰਡਲ ਦਾ ਪਤਾ ਲਗਾ ਸਕਦੀ ਹੈ, ਪਰ ਸਥਾਨਿਕ ਰੈਜ਼ੋਲਿਊਸ਼ਨ ਮੁਕਾਬਲਤਨ ਘੱਟ ਹੈ। ਲਿਡਰ ਦੀ ਵਰਤੋਂ ਵਾਯੂਮੰਡਲ ਵਿੱਚ ਇੱਕ ਲੇਜ਼ਰ ਬੀਮ ਛੱਡ ਕੇ ਅਤੇ ਵਾਯੂਮੰਡਲ ਦੇ ਅਣੂਆਂ ਜਾਂ ਐਰੋਸੋਲ ਅਤੇ ਲੇਜ਼ਰ ਵਿਚਕਾਰ ਪਰਸਪਰ ਪ੍ਰਭਾਵ (ਖਿੰਡਣ ਅਤੇ ਸਮਾਈ) ਦੀ ਵਰਤੋਂ ਕਰਕੇ ਵਾਯੂਮੰਡਲ ਦੇ ਮਾਪਦੰਡ ਪ੍ਰਾਪਤ ਕਰਨ ਲਈ ਕੀਤੀ ਜਾਂਦੀ ਹੈ।
ਲੇਜ਼ਰ ਦੀ ਮਜ਼ਬੂਤ ਦਿਸ਼ਾ, ਛੋਟੀ ਤਰੰਗ-ਲੰਬਾਈ (ਮਾਈਕ੍ਰੋਨ ਵੇਵ) ਅਤੇ ਤੰਗ ਪਲਸ ਚੌੜਾਈ, ਅਤੇ ਫੋਟੋਡਿਟੈਕਟਰ (ਫੋਟੋਮਲਟੀਪਲਾਇਰ ਟਿਊਬ, ਸਿੰਗਲ ਫੋਟੋਨ ਡਿਟੈਕਟਰ) ਦੀ ਉੱਚ ਸੰਵੇਦਨਸ਼ੀਲਤਾ ਦੇ ਕਾਰਨ, ਲਿਡਾਰ ਵਾਯੂਮੰਡਲ ਦੇ ਮਾਪਦੰਡਾਂ ਦੀ ਉੱਚ ਸ਼ੁੱਧਤਾ ਅਤੇ ਉੱਚ ਸਥਾਨਿਕ ਅਤੇ ਅਸਥਾਈ ਰੈਜ਼ੋਲੂਸ਼ਨ ਖੋਜ ਪ੍ਰਾਪਤ ਕਰ ਸਕਦਾ ਹੈ। ਇਸਦੀ ਉੱਚ ਸ਼ੁੱਧਤਾ, ਉੱਚ ਸਥਾਨਿਕ ਅਤੇ ਅਸਥਾਈ ਰੈਜ਼ੋਲੂਸ਼ਨ ਅਤੇ ਨਿਰੰਤਰ ਨਿਗਰਾਨੀ ਦੇ ਕਾਰਨ, LIDAR ਵਾਯੂਮੰਡਲ ਦੇ ਐਰੋਸੋਲ, ਬੱਦਲਾਂ, ਹਵਾ ਪ੍ਰਦੂਸ਼ਕਾਂ, ਵਾਯੂਮੰਡਲ ਦੇ ਤਾਪਮਾਨ ਅਤੇ ਹਵਾ ਦੀ ਗਤੀ ਦੀ ਖੋਜ ਵਿੱਚ ਤੇਜ਼ੀ ਨਾਲ ਵਿਕਾਸ ਕਰ ਰਿਹਾ ਹੈ।
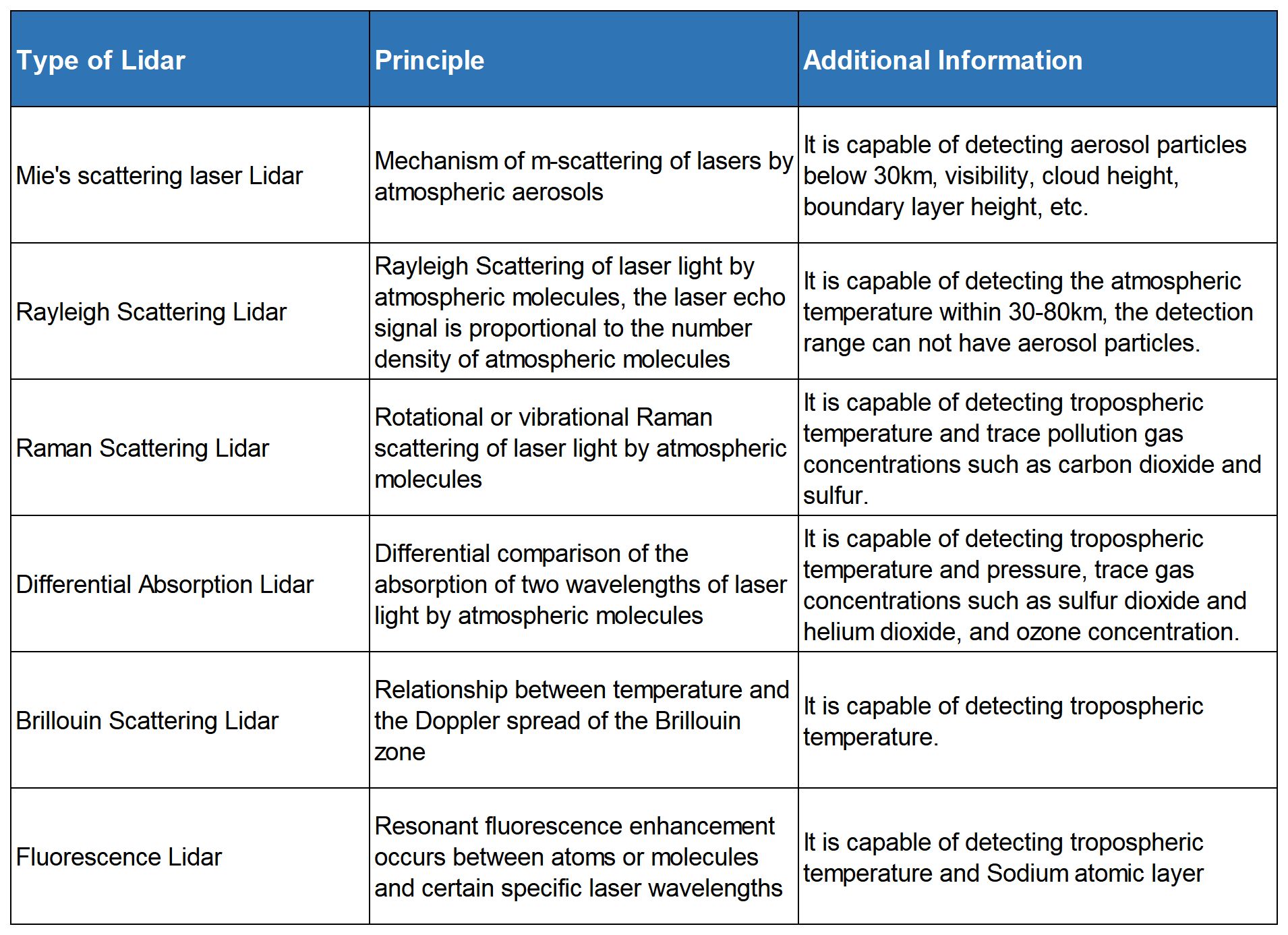
ਲਿਡਰ ਦੀਆਂ ਕਿਸਮਾਂ ਹੇਠ ਲਿਖੀ ਸਾਰਣੀ ਵਿੱਚ ਦਰਸਾਈਆਂ ਗਈਆਂ ਹਨ:
ਵਾਯੂਮੰਡਲ ਖੋਜ ਵਿਧੀਆਂ
ਵਾਯੂਮੰਡਲੀ ਖੋਜ ਦੇ ਮੁੱਖ ਤਰੀਕੇ ਹਨ: ਮਾਈਕ੍ਰੋਵੇਵ ਰਾਡਾਰ ਸਾਊਂਡਿੰਗ ਵਿਧੀ, ਏਅਰਬੋਰਨ ਜਾਂ ਰਾਕੇਟ ਸਾਊਂਡਿੰਗ ਵਿਧੀ, ਸਾਊਂਡਿੰਗ ਬੈਲੂਨ, ਸੈਟੇਲਾਈਟ ਰਿਮੋਟ ਸੈਂਸਿੰਗ, ਅਤੇ LIDAR। ਮਾਈਕ੍ਰੋਵੇਵ ਰਾਡਾਰ ਛੋਟੇ ਕਣਾਂ ਦਾ ਪਤਾ ਨਹੀਂ ਲਗਾ ਸਕਦਾ ਕਿਉਂਕਿ ਵਾਯੂਮੰਡਲ ਵਿੱਚ ਭੇਜੇ ਗਏ ਮਾਈਕ੍ਰੋਵੇਵ ਮਿਲੀਮੀਟਰ ਜਾਂ ਸੈਂਟੀਮੀਟਰ ਤਰੰਗਾਂ ਹਨ, ਜਿਨ੍ਹਾਂ ਦੀ ਤਰੰਗ-ਲੰਬਾਈ ਲੰਬੀ ਹੁੰਦੀ ਹੈ ਅਤੇ ਛੋਟੇ ਕਣਾਂ, ਖਾਸ ਕਰਕੇ ਵੱਖ-ਵੱਖ ਅਣੂਆਂ ਨਾਲ ਪਰਸਪਰ ਪ੍ਰਭਾਵ ਨਹੀਂ ਪਾ ਸਕਦੇ।
ਹਵਾ ਰਾਹੀਂ ਅਤੇ ਰਾਕੇਟ ਰਾਹੀਂ ਆਵਾਜ਼ ਕੱਢਣ ਦੇ ਤਰੀਕੇ ਵਧੇਰੇ ਮਹਿੰਗੇ ਹੁੰਦੇ ਹਨ ਅਤੇ ਲੰਬੇ ਸਮੇਂ ਲਈ ਨਹੀਂ ਦੇਖੇ ਜਾ ਸਕਦੇ। ਹਾਲਾਂਕਿ ਗੁਬਾਰਿਆਂ ਨੂੰ ਆਵਾਜ਼ ਕੱਢਣ ਦੀ ਲਾਗਤ ਘੱਟ ਹੁੰਦੀ ਹੈ, ਪਰ ਉਹ ਹਵਾ ਦੀ ਗਤੀ ਤੋਂ ਵਧੇਰੇ ਪ੍ਰਭਾਵਿਤ ਹੁੰਦੇ ਹਨ। ਸੈਟੇਲਾਈਟ ਰਿਮੋਟ ਸੈਂਸਿੰਗ ਔਨ-ਬੋਰਡ ਰਾਡਾਰ ਦੀ ਵਰਤੋਂ ਕਰਕੇ ਵੱਡੇ ਪੱਧਰ 'ਤੇ ਗਲੋਬਲ ਵਾਯੂਮੰਡਲ ਦਾ ਪਤਾ ਲਗਾ ਸਕਦੀ ਹੈ, ਪਰ ਸਥਾਨਿਕ ਰੈਜ਼ੋਲਿਊਸ਼ਨ ਮੁਕਾਬਲਤਨ ਘੱਟ ਹੈ। ਲਿਡਰ ਦੀ ਵਰਤੋਂ ਵਾਯੂਮੰਡਲ ਵਿੱਚ ਇੱਕ ਲੇਜ਼ਰ ਬੀਮ ਛੱਡ ਕੇ ਅਤੇ ਵਾਯੂਮੰਡਲ ਦੇ ਅਣੂਆਂ ਜਾਂ ਐਰੋਸੋਲ ਅਤੇ ਲੇਜ਼ਰ ਵਿਚਕਾਰ ਪਰਸਪਰ ਪ੍ਰਭਾਵ (ਖਿੰਡਣ ਅਤੇ ਸਮਾਈ) ਦੀ ਵਰਤੋਂ ਕਰਕੇ ਵਾਯੂਮੰਡਲ ਦੇ ਮਾਪਦੰਡ ਪ੍ਰਾਪਤ ਕਰਨ ਲਈ ਕੀਤੀ ਜਾਂਦੀ ਹੈ।
ਲੇਜ਼ਰ ਦੀ ਮਜ਼ਬੂਤ ਦਿਸ਼ਾ, ਛੋਟੀ ਤਰੰਗ-ਲੰਬਾਈ (ਮਾਈਕ੍ਰੋਨ ਵੇਵ) ਅਤੇ ਤੰਗ ਪਲਸ ਚੌੜਾਈ, ਅਤੇ ਫੋਟੋਡਿਟੈਕਟਰ (ਫੋਟੋਮਲਟੀਪਲਾਇਰ ਟਿਊਬ, ਸਿੰਗਲ ਫੋਟੋਨ ਡਿਟੈਕਟਰ) ਦੀ ਉੱਚ ਸੰਵੇਦਨਸ਼ੀਲਤਾ ਦੇ ਕਾਰਨ, ਲਿਡਾਰ ਵਾਯੂਮੰਡਲ ਦੇ ਮਾਪਦੰਡਾਂ ਦੀ ਉੱਚ ਸ਼ੁੱਧਤਾ ਅਤੇ ਉੱਚ ਸਥਾਨਿਕ ਅਤੇ ਅਸਥਾਈ ਰੈਜ਼ੋਲੂਸ਼ਨ ਖੋਜ ਪ੍ਰਾਪਤ ਕਰ ਸਕਦਾ ਹੈ। ਇਸਦੀ ਉੱਚ ਸ਼ੁੱਧਤਾ, ਉੱਚ ਸਥਾਨਿਕ ਅਤੇ ਅਸਥਾਈ ਰੈਜ਼ੋਲੂਸ਼ਨ ਅਤੇ ਨਿਰੰਤਰ ਨਿਗਰਾਨੀ ਦੇ ਕਾਰਨ, LIDAR ਵਾਯੂਮੰਡਲ ਦੇ ਐਰੋਸੋਲ, ਬੱਦਲਾਂ, ਹਵਾ ਪ੍ਰਦੂਸ਼ਕਾਂ, ਵਾਯੂਮੰਡਲ ਦੇ ਤਾਪਮਾਨ ਅਤੇ ਹਵਾ ਦੀ ਗਤੀ ਦੀ ਖੋਜ ਵਿੱਚ ਤੇਜ਼ੀ ਨਾਲ ਵਿਕਾਸ ਕਰ ਰਿਹਾ ਹੈ।
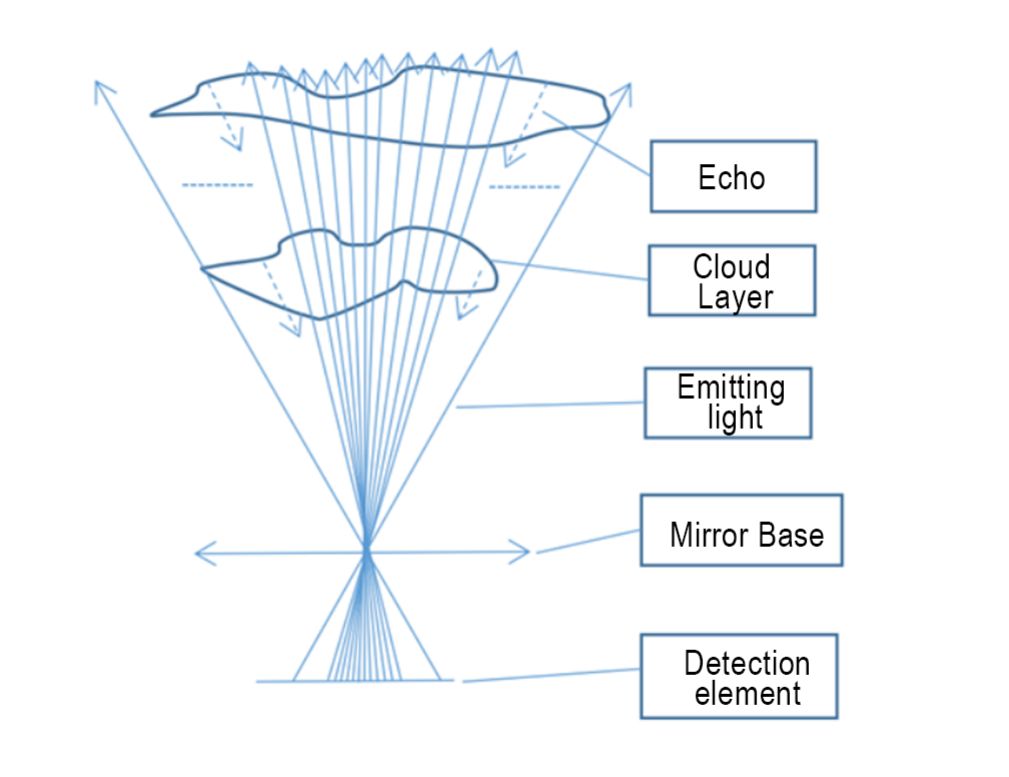
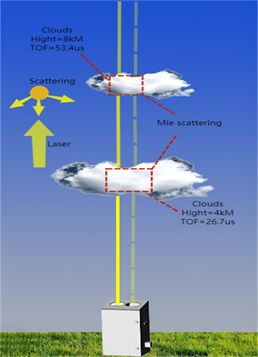
ਕਲਾਉਡ ਮਾਪ ਰਾਡਾਰ ਦੇ ਸਿਧਾਂਤ ਦਾ ਯੋਜਨਾਬੱਧ ਚਿੱਤਰ
ਬੱਦਲਾਂ ਦੀ ਪਰਤ: ਹਵਾ ਵਿੱਚ ਤੈਰਦੀ ਇੱਕ ਬੱਦਲਾਂ ਦੀ ਪਰਤ; ਉਤਸਰਜਿਤ ਰੌਸ਼ਨੀ: ਇੱਕ ਖਾਸ ਤਰੰਗ-ਲੰਬਾਈ ਦਾ ਇੱਕ ਸੰਯੋਜਿਤ ਬੀਮ; ਗੂੰਜ: ਬੱਦਲਾਂ ਦੀ ਪਰਤ ਵਿੱਚੋਂ ਨਿਕਾਸ ਦੇ ਲੰਘਣ ਤੋਂ ਬਾਅਦ ਪੈਦਾ ਹੋਣ ਵਾਲਾ ਬੈਕਸਕੈਟਰਡ ਸਿਗਨਲ; ਸ਼ੀਸ਼ੇ ਦਾ ਅਧਾਰ: ਟੈਲੀਸਕੋਪ ਸਿਸਟਮ ਦੀ ਬਰਾਬਰ ਸਤ੍ਹਾ; ਖੋਜ ਤੱਤ: ਕਮਜ਼ੋਰ ਗੂੰਜ ਸਿਗਨਲ ਪ੍ਰਾਪਤ ਕਰਨ ਲਈ ਵਰਤਿਆ ਜਾਣ ਵਾਲਾ ਫੋਟੋਇਲੈਕਟ੍ਰਿਕ ਯੰਤਰ।
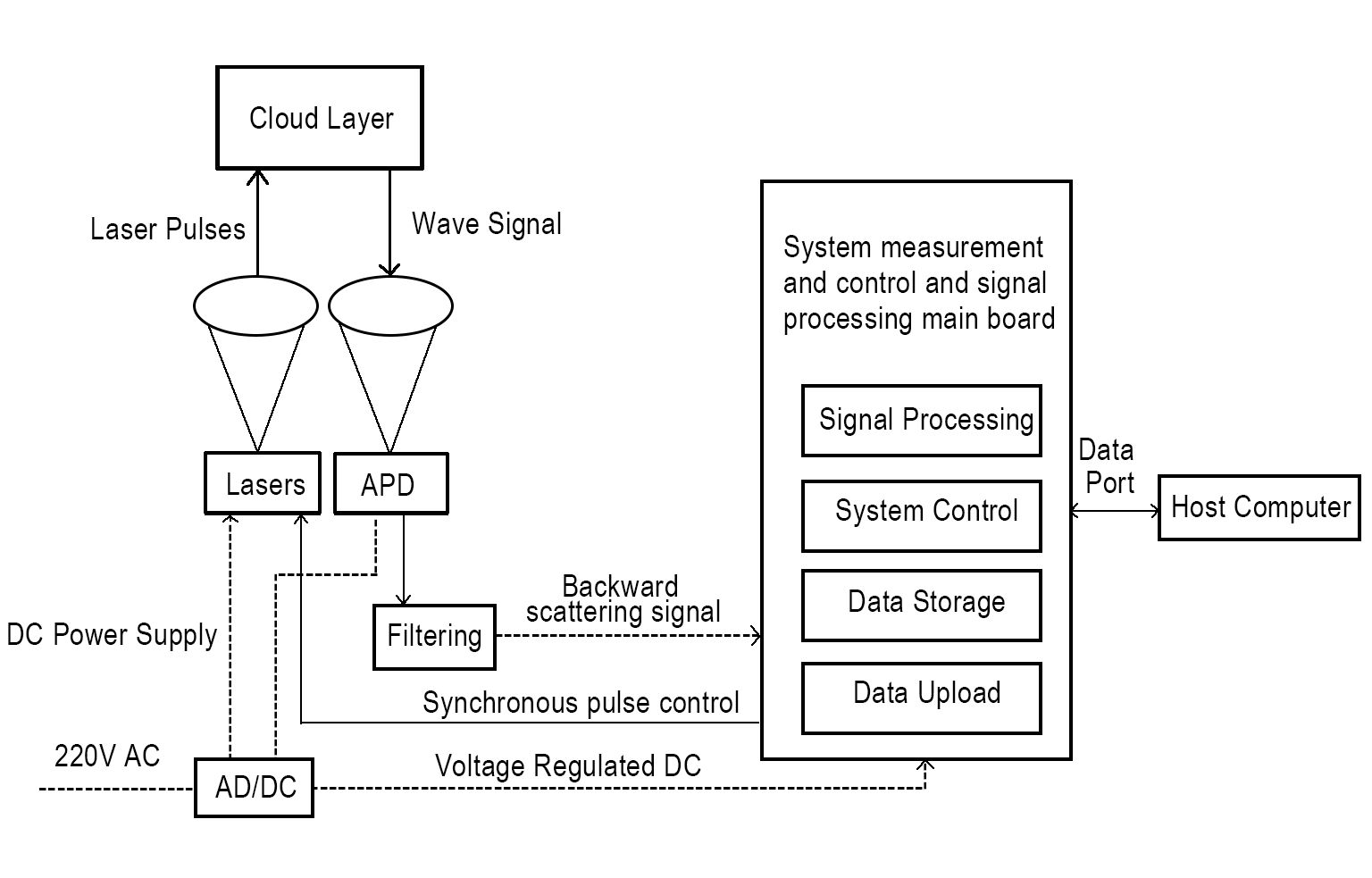
ਕਲਾਉਡ ਮਾਪ ਰਾਡਾਰ ਸਿਸਟਮ ਦਾ ਕਾਰਜਸ਼ੀਲ ਢਾਂਚਾ
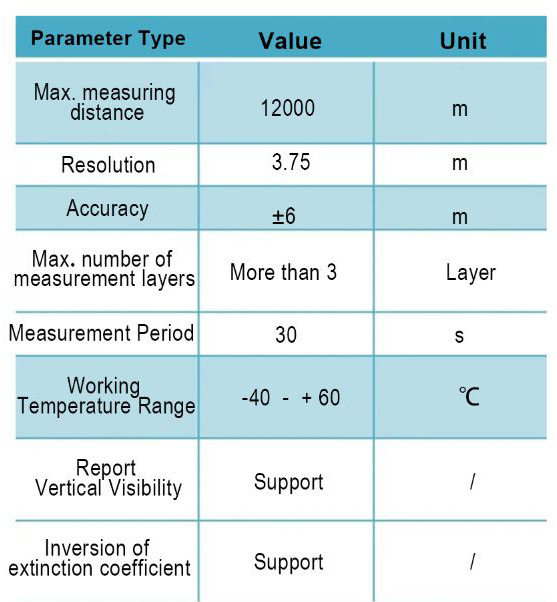
ਲੂਮਿਸਪੋਟ ਟੈਕ ਕਲਾਉਡ ਮਾਪ ਲਿਡਰ ਦੇ ਮੁੱਖ ਤਕਨੀਕੀ ਮਾਪਦੰਡ
ਉਤਪਾਦ ਦੀ ਤਸਵੀਰ

ਐਪਲੀਕੇਸ਼ਨ

ਉਤਪਾਦਾਂ ਦੀ ਕਾਰਜਸ਼ੀਲ ਸਥਿਤੀ ਚਿੱਤਰ
ਪੋਸਟ ਸਮਾਂ: ਮਈ-09-2023