ਜਾਣ-ਪਛਾਣ
1960 ਦੇ ਦਹਾਕੇ ਦੇ ਅਖੀਰ ਅਤੇ 1970 ਦੇ ਦਹਾਕੇ ਦੇ ਸ਼ੁਰੂ ਤੋਂ, ਜ਼ਿਆਦਾਤਰ ਰਵਾਇਤੀ ਏਰੀਅਲ ਫੋਟੋਗ੍ਰਾਫੀ ਪ੍ਰਣਾਲੀਆਂ ਨੂੰ ਏਅਰਬੋਰਨ ਅਤੇ ਏਰੋਸਪੇਸ ਇਲੈਕਟ੍ਰੋ-ਆਪਟੀਕਲ ਅਤੇ ਇਲੈਕਟ੍ਰਾਨਿਕ ਸੈਂਸਰ ਪ੍ਰਣਾਲੀਆਂ ਦੁਆਰਾ ਬਦਲ ਦਿੱਤਾ ਗਿਆ ਹੈ। ਜਦੋਂ ਕਿ ਰਵਾਇਤੀ ਏਰੀਅਲ ਫੋਟੋਗ੍ਰਾਫੀ ਮੁੱਖ ਤੌਰ 'ਤੇ ਦ੍ਰਿਸ਼ਮਾਨ-ਪ੍ਰਕਾਸ਼ ਤਰੰਗ-ਲੰਬਾਈ ਵਿੱਚ ਕੰਮ ਕਰਦੀ ਹੈ, ਆਧੁਨਿਕ ਏਅਰਬੋਰਨ ਅਤੇ ਜ਼ਮੀਨ-ਅਧਾਰਤ ਰਿਮੋਟ ਸੈਂਸਿੰਗ ਪ੍ਰਣਾਲੀਆਂ ਦ੍ਰਿਸ਼ਮਾਨ ਪ੍ਰਕਾਸ਼, ਪ੍ਰਤੀਬਿੰਬਿਤ ਇਨਫਰਾਰੈੱਡ, ਥਰਮਲ ਇਨਫਰਾਰੈੱਡ, ਅਤੇ ਮਾਈਕ੍ਰੋਵੇਵ ਸਪੈਕਟ੍ਰਲ ਖੇਤਰਾਂ ਨੂੰ ਕਵਰ ਕਰਨ ਵਾਲੇ ਡਿਜੀਟਲ ਡੇਟਾ ਪੈਦਾ ਕਰਦੀਆਂ ਹਨ। ਏਰੀਅਲ ਫੋਟੋਗ੍ਰਾਫੀ ਵਿੱਚ ਰਵਾਇਤੀ ਵਿਜ਼ੂਅਲ ਵਿਆਖਿਆ ਵਿਧੀਆਂ ਅਜੇ ਵੀ ਮਦਦਗਾਰ ਹਨ। ਫਿਰ ਵੀ, ਰਿਮੋਟ ਸੈਂਸਿੰਗ ਐਪਲੀਕੇਸ਼ਨਾਂ ਦੀ ਇੱਕ ਵਿਸ਼ਾਲ ਸ਼੍ਰੇਣੀ ਨੂੰ ਕਵਰ ਕਰਦੀ ਹੈ, ਜਿਸ ਵਿੱਚ ਵਾਧੂ ਗਤੀਵਿਧੀਆਂ ਜਿਵੇਂ ਕਿ ਨਿਸ਼ਾਨਾ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਦੀ ਸਿਧਾਂਤਕ ਮਾਡਲਿੰਗ, ਵਸਤੂਆਂ ਦੇ ਸਪੈਕਟ੍ਰਲ ਮਾਪ, ਅਤੇ ਜਾਣਕਾਰੀ ਕੱਢਣ ਲਈ ਡਿਜੀਟਲ ਚਿੱਤਰ ਵਿਸ਼ਲੇਸ਼ਣ ਸ਼ਾਮਲ ਹਨ।
ਰਿਮੋਟ ਸੈਂਸਿੰਗ, ਜੋ ਕਿ ਗੈਰ-ਸੰਪਰਕ ਲੰਬੀ-ਸੀਮਾ ਖੋਜ ਤਕਨੀਕਾਂ ਦੇ ਸਾਰੇ ਪਹਿਲੂਆਂ ਨੂੰ ਦਰਸਾਉਂਦੀ ਹੈ, ਇੱਕ ਅਜਿਹਾ ਤਰੀਕਾ ਹੈ ਜੋ ਇੱਕ ਟੀਚੇ ਦੀਆਂ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਦਾ ਪਤਾ ਲਗਾਉਣ, ਰਿਕਾਰਡ ਕਰਨ ਅਤੇ ਮਾਪਣ ਲਈ ਇਲੈਕਟ੍ਰੋਮੈਗਨੇਟਿਜ਼ਮ ਦੀ ਵਰਤੋਂ ਕਰਦਾ ਹੈ ਅਤੇ ਇਹ ਪਰਿਭਾਸ਼ਾ ਪਹਿਲੀ ਵਾਰ 1950 ਦੇ ਦਹਾਕੇ ਵਿੱਚ ਪ੍ਰਸਤਾਵਿਤ ਕੀਤੀ ਗਈ ਸੀ। ਰਿਮੋਟ ਸੈਂਸਿੰਗ ਅਤੇ ਮੈਪਿੰਗ ਦੇ ਖੇਤਰ ਵਿੱਚ, ਇਸਨੂੰ 2 ਸੈਂਸਿੰਗ ਮੋਡਾਂ ਵਿੱਚ ਵੰਡਿਆ ਗਿਆ ਹੈ: ਕਿਰਿਆਸ਼ੀਲ ਅਤੇ ਪੈਸਿਵ ਸੈਂਸਿੰਗ, ਜਿਸ ਵਿੱਚੋਂ ਲਿਡਰ ਸੈਂਸਿੰਗ ਸਰਗਰਮ ਹੈ, ਟੀਚੇ ਨੂੰ ਪ੍ਰਕਾਸ਼ ਛੱਡਣ ਅਤੇ ਇਸ ਤੋਂ ਪ੍ਰਤੀਬਿੰਬਿਤ ਪ੍ਰਕਾਸ਼ ਦਾ ਪਤਾ ਲਗਾਉਣ ਲਈ ਆਪਣੀ ਊਰਜਾ ਦੀ ਵਰਤੋਂ ਕਰਨ ਦੇ ਯੋਗ ਹੈ।
ਐਕਟਿਵ ਲਿਡਰ ਸੈਂਸਿੰਗ ਅਤੇ ਐਪਲੀਕੇਸ਼ਨ
ਲਿਡਰ (ਰੌਸ਼ਨੀ ਖੋਜ ਅਤੇ ਰੇਂਜਿੰਗ) ਇੱਕ ਤਕਨਾਲੋਜੀ ਹੈ ਜੋ ਲੇਜ਼ਰ ਸਿਗਨਲਾਂ ਦੇ ਉਤਸਰਜਨ ਅਤੇ ਪ੍ਰਾਪਤ ਕਰਨ ਦੇ ਸਮੇਂ ਦੇ ਅਧਾਰ ਤੇ ਦੂਰੀ ਨੂੰ ਮਾਪਦੀ ਹੈ। ਕਈ ਵਾਰ ਏਅਰਬੋਰਨ ਲਿਡਰ ਨੂੰ ਏਅਰਬੋਰਨ ਲੇਜ਼ਰ ਸਕੈਨਿੰਗ, ਮੈਪਿੰਗ, ਜਾਂ ਲਿਡਰ ਨਾਲ ਬਦਲਵੇਂ ਰੂਪ ਵਿੱਚ ਲਾਗੂ ਕੀਤਾ ਜਾਂਦਾ ਹੈ।
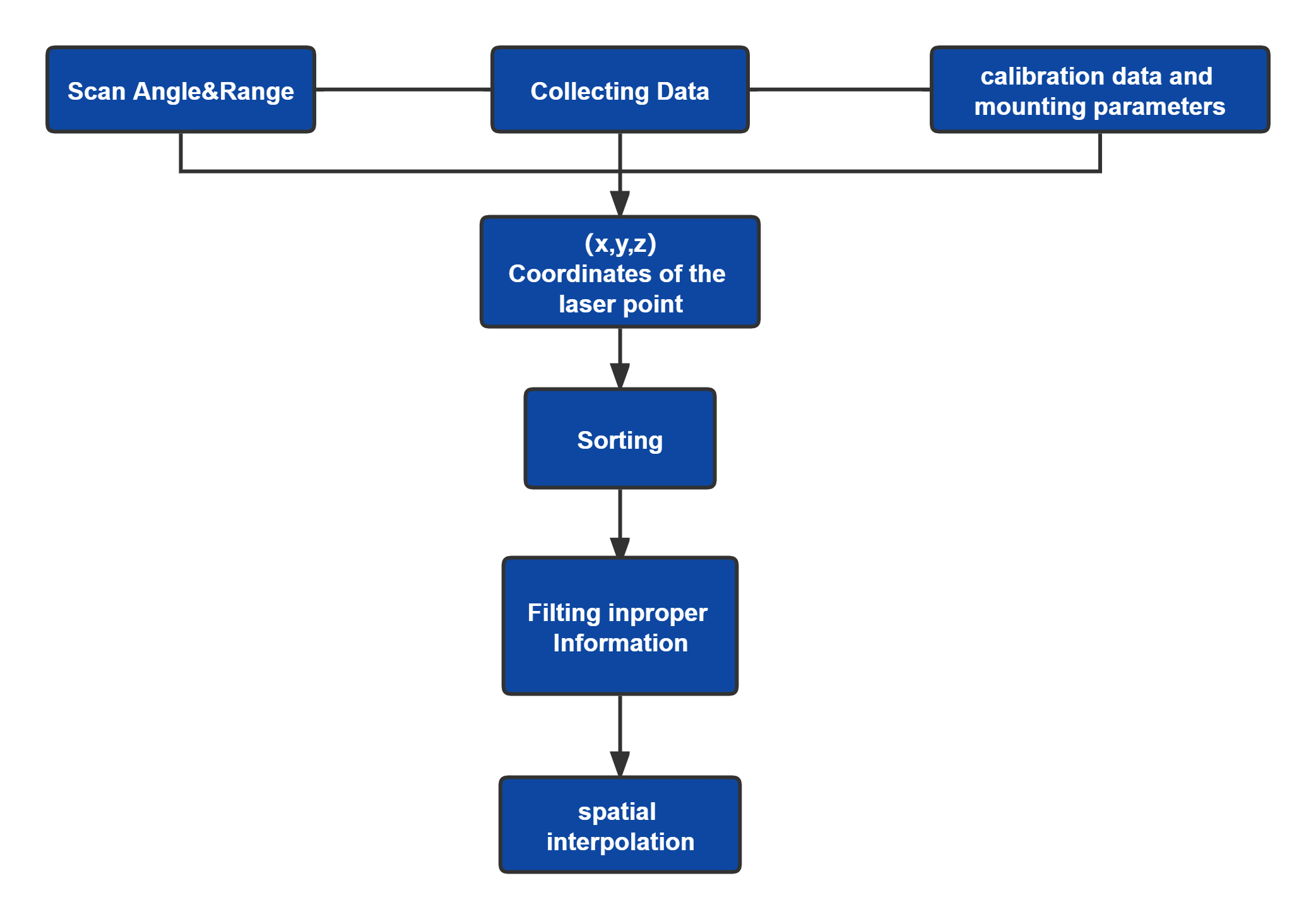
ਇਹ ਇੱਕ ਆਮ ਫਲੋਚਾਰਟ ਹੈ ਜੋ LiDAR ਵਰਤੋਂ ਦੌਰਾਨ ਪੁਆਇੰਟ ਡੇਟਾ ਪ੍ਰੋਸੈਸਿੰਗ ਦੇ ਮੁੱਖ ਕਦਮਾਂ ਨੂੰ ਦਰਸਾਉਂਦਾ ਹੈ। (x, y, z) ਕੋਆਰਡੀਨੇਟਸ ਨੂੰ ਇਕੱਠਾ ਕਰਨ ਤੋਂ ਬਾਅਦ, ਇਹਨਾਂ ਬਿੰਦੂਆਂ ਨੂੰ ਛਾਂਟਣ ਨਾਲ ਡੇਟਾ ਰੈਂਡਰਿੰਗ ਅਤੇ ਪ੍ਰੋਸੈਸਿੰਗ ਦੀ ਕੁਸ਼ਲਤਾ ਵਿੱਚ ਸੁਧਾਰ ਹੋ ਸਕਦਾ ਹੈ। LiDAR ਬਿੰਦੂਆਂ ਦੀ ਜਿਓਮੈਟ੍ਰਿਕ ਪ੍ਰੋਸੈਸਿੰਗ ਤੋਂ ਇਲਾਵਾ, LiDAR ਫੀਡਬੈਕ ਤੋਂ ਤੀਬਰਤਾ ਦੀ ਜਾਣਕਾਰੀ ਵੀ ਉਪਯੋਗੀ ਹੈ।
ਸਾਰੇ ਰਿਮੋਟ ਸੈਂਸਿੰਗ ਅਤੇ ਮੈਪਿੰਗ ਐਪਲੀਕੇਸ਼ਨਾਂ ਵਿੱਚ, LiDAR ਦਾ ਸੂਰਜ ਦੀ ਰੌਸ਼ਨੀ ਅਤੇ ਹੋਰ ਮੌਸਮ ਪ੍ਰਭਾਵਾਂ ਤੋਂ ਸੁਤੰਤਰ ਵਧੇਰੇ ਸਹੀ ਮਾਪ ਪ੍ਰਾਪਤ ਕਰਨ ਦਾ ਇੱਕ ਵੱਖਰਾ ਫਾਇਦਾ ਹੈ। ਇੱਕ ਆਮ ਰਿਮੋਟ ਸੈਂਸਿੰਗ ਸਿਸਟਮ ਵਿੱਚ ਦੋ ਹਿੱਸੇ ਹੁੰਦੇ ਹਨ, ਇੱਕ ਲੇਜ਼ਰ ਰੇਂਜਫਾਈਂਡਰ ਅਤੇ ਸਥਿਤੀ ਲਈ ਇੱਕ ਮਾਪ ਸੈਂਸਰ, ਜੋ ਭੂਗੋਲਿਕ ਵਾਤਾਵਰਣ ਨੂੰ ਸਿੱਧੇ ਤੌਰ 'ਤੇ 3D ਵਿੱਚ ਮਾਪ ਸਕਦਾ ਹੈ ਬਿਨਾਂ ਜਿਓਮੈਟ੍ਰਿਕ ਵਿਗਾੜ ਦੇ ਕਿਉਂਕਿ ਕੋਈ ਇਮੇਜਿੰਗ ਸ਼ਾਮਲ ਨਹੀਂ ਹੈ (3D ਸੰਸਾਰ ਨੂੰ 2D ਪਲੇਨ ਵਿੱਚ ਚਿੱਤਰਿਆ ਗਿਆ ਹੈ)।
ਸਾਡੇ ਕੁਝ ਲੀਡਰ ਸਰੋਤ
ਸੈਂਸਰ ਲਈ ਅੱਖਾਂ ਲਈ ਸੁਰੱਖਿਅਤ LiDAR ਲੇਜ਼ਰ ਸਰੋਤ ਵਿਕਲਪ


