ਜਾਣ-ਪਛਾਣ
1960 ਦੇ ਦਹਾਕੇ ਦੇ ਅਖੀਰ ਅਤੇ 1970 ਦੇ ਦਹਾਕੇ ਦੇ ਸ਼ੁਰੂ ਤੋਂ, ਜ਼ਿਆਦਾਤਰ ਪਰੰਪਰਾਗਤ ਏਰੀਅਲ ਫੋਟੋਗ੍ਰਾਫੀ ਪ੍ਰਣਾਲੀਆਂ ਨੂੰ ਏਅਰਬੋਰਨ ਅਤੇ ਏਰੋਸਪੇਸ ਇਲੈਕਟ੍ਰੋ-ਆਪਟੀਕਲ ਅਤੇ ਇਲੈਕਟ੍ਰਾਨਿਕ ਸੈਂਸਰ ਪ੍ਰਣਾਲੀਆਂ ਦੁਆਰਾ ਬਦਲ ਦਿੱਤਾ ਗਿਆ ਹੈ। ਜਦੋਂ ਕਿ ਪਰੰਪਰਾਗਤ ਏਰੀਅਲ ਫੋਟੋਗ੍ਰਾਫੀ ਮੁੱਖ ਤੌਰ 'ਤੇ ਦਿਖਣਯੋਗ-ਰੌਸ਼ਨੀ ਤਰੰਗ-ਲੰਬਾਈ ਵਿੱਚ ਕੰਮ ਕਰਦੀ ਹੈ, ਆਧੁਨਿਕ ਏਅਰਬੋਰਨ ਅਤੇ ਜ਼ਮੀਨੀ-ਅਧਾਰਿਤ ਰਿਮੋਟ ਸੈਂਸਿੰਗ ਸਿਸਟਮ ਦ੍ਰਿਸ਼ਮਾਨ ਰੌਸ਼ਨੀ, ਪ੍ਰਤੀਬਿੰਬਿਤ ਇਨਫਰਾਰੈੱਡ, ਥਰਮਲ ਇਨਫਰਾਰੈੱਡ, ਅਤੇ ਮਾਈਕ੍ਰੋਵੇਵ ਸਪੈਕਟ੍ਰਲ ਖੇਤਰਾਂ ਨੂੰ ਕਵਰ ਕਰਨ ਵਾਲੇ ਡਿਜੀਟਲ ਡੇਟਾ ਦਾ ਉਤਪਾਦਨ ਕਰਦੇ ਹਨ। ਏਰੀਅਲ ਫੋਟੋਗ੍ਰਾਫੀ ਵਿੱਚ ਰਵਾਇਤੀ ਵਿਜ਼ੂਅਲ ਵਿਆਖਿਆ ਦੇ ਤਰੀਕੇ ਅਜੇ ਵੀ ਮਦਦਗਾਰ ਹਨ। ਫਿਰ ਵੀ, ਰਿਮੋਟ ਸੈਂਸਿੰਗ ਐਪਲੀਕੇਸ਼ਨਾਂ ਦੀ ਇੱਕ ਵਿਸ਼ਾਲ ਸ਼੍ਰੇਣੀ ਨੂੰ ਕਵਰ ਕਰਦੀ ਹੈ, ਜਿਸ ਵਿੱਚ ਅਤਿਰਿਕਤ ਗਤੀਵਿਧੀਆਂ ਸ਼ਾਮਲ ਹਨ ਜਿਵੇਂ ਕਿ ਟੀਚੇ ਦੀਆਂ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਦੀ ਸਿਧਾਂਤਕ ਮਾਡਲਿੰਗ, ਵਸਤੂਆਂ ਦੇ ਸਪੈਕਟ੍ਰਲ ਮਾਪ, ਅਤੇ ਜਾਣਕਾਰੀ ਕੱਢਣ ਲਈ ਡਿਜੀਟਲ ਚਿੱਤਰ ਵਿਸ਼ਲੇਸ਼ਣ।
ਰਿਮੋਟ ਸੈਂਸਿੰਗ, ਜੋ ਕਿ ਗੈਰ-ਸੰਪਰਕ ਲੰਬੀ-ਸੀਮਾ ਖੋਜ ਤਕਨੀਕਾਂ ਦੇ ਸਾਰੇ ਪਹਿਲੂਆਂ ਨੂੰ ਦਰਸਾਉਂਦੀ ਹੈ, ਇੱਕ ਵਿਧੀ ਹੈ ਜੋ ਇੱਕ ਟੀਚੇ ਦੀਆਂ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਦਾ ਪਤਾ ਲਗਾਉਣ, ਰਿਕਾਰਡ ਕਰਨ ਅਤੇ ਮਾਪਣ ਲਈ ਇਲੈਕਟ੍ਰੋਮੈਗਨੇਟਿਜ਼ਮ ਦੀ ਵਰਤੋਂ ਕਰਦੀ ਹੈ ਅਤੇ ਪਰਿਭਾਸ਼ਾ ਪਹਿਲੀ ਵਾਰ 1950 ਵਿੱਚ ਪ੍ਰਸਤਾਵਿਤ ਕੀਤੀ ਗਈ ਸੀ। ਰਿਮੋਟ ਸੈਂਸਿੰਗ ਅਤੇ ਮੈਪਿੰਗ ਦੇ ਖੇਤਰ ਵਿੱਚ, ਇਸਨੂੰ 2 ਸੈਂਸਿੰਗ ਮੋਡਾਂ ਵਿੱਚ ਵੰਡਿਆ ਗਿਆ ਹੈ: ਕਿਰਿਆਸ਼ੀਲ ਅਤੇ ਪੈਸਿਵ ਸੈਂਸਿੰਗ, ਜਿਸ ਵਿੱਚੋਂ ਲਿਡਰ ਸੈਂਸਿੰਗ ਸਰਗਰਮ ਹੈ, ਟੀਚੇ ਤੱਕ ਪ੍ਰਕਾਸ਼ ਨੂੰ ਛੱਡਣ ਅਤੇ ਇਸ ਤੋਂ ਪ੍ਰਤੀਬਿੰਬਿਤ ਰੌਸ਼ਨੀ ਦਾ ਪਤਾ ਲਗਾਉਣ ਲਈ ਆਪਣੀ ਊਰਜਾ ਦੀ ਵਰਤੋਂ ਕਰਨ ਦੇ ਯੋਗ ਹੈ।
ਐਕਟਿਵ ਲਿਡਰ ਸੈਂਸਿੰਗ ਅਤੇ ਐਪਲੀਕੇਸ਼ਨ
ਲਿਡਰ (ਰੌਸ਼ਨੀ ਖੋਜ ਅਤੇ ਰੇਂਜਿੰਗ) ਇੱਕ ਤਕਨੀਕ ਹੈ ਜੋ ਲੇਜ਼ਰ ਸਿਗਨਲਾਂ ਦੇ ਉਤਸਰਜਨ ਅਤੇ ਪ੍ਰਾਪਤ ਕਰਨ ਦੇ ਸਮੇਂ ਦੇ ਅਧਾਰ ਤੇ ਦੂਰੀ ਨੂੰ ਮਾਪਦੀ ਹੈ। ਕਈ ਵਾਰ ਏਅਰਬੋਰਨ ਲਿਡਾਰ ਨੂੰ ਏਅਰਬੋਰਨ ਲੇਜ਼ਰ ਸਕੈਨਿੰਗ, ਮੈਪਿੰਗ, ਜਾਂ ਲਿਡਾਰ ਨਾਲ ਬਦਲਿਆ ਜਾ ਸਕਦਾ ਹੈ।
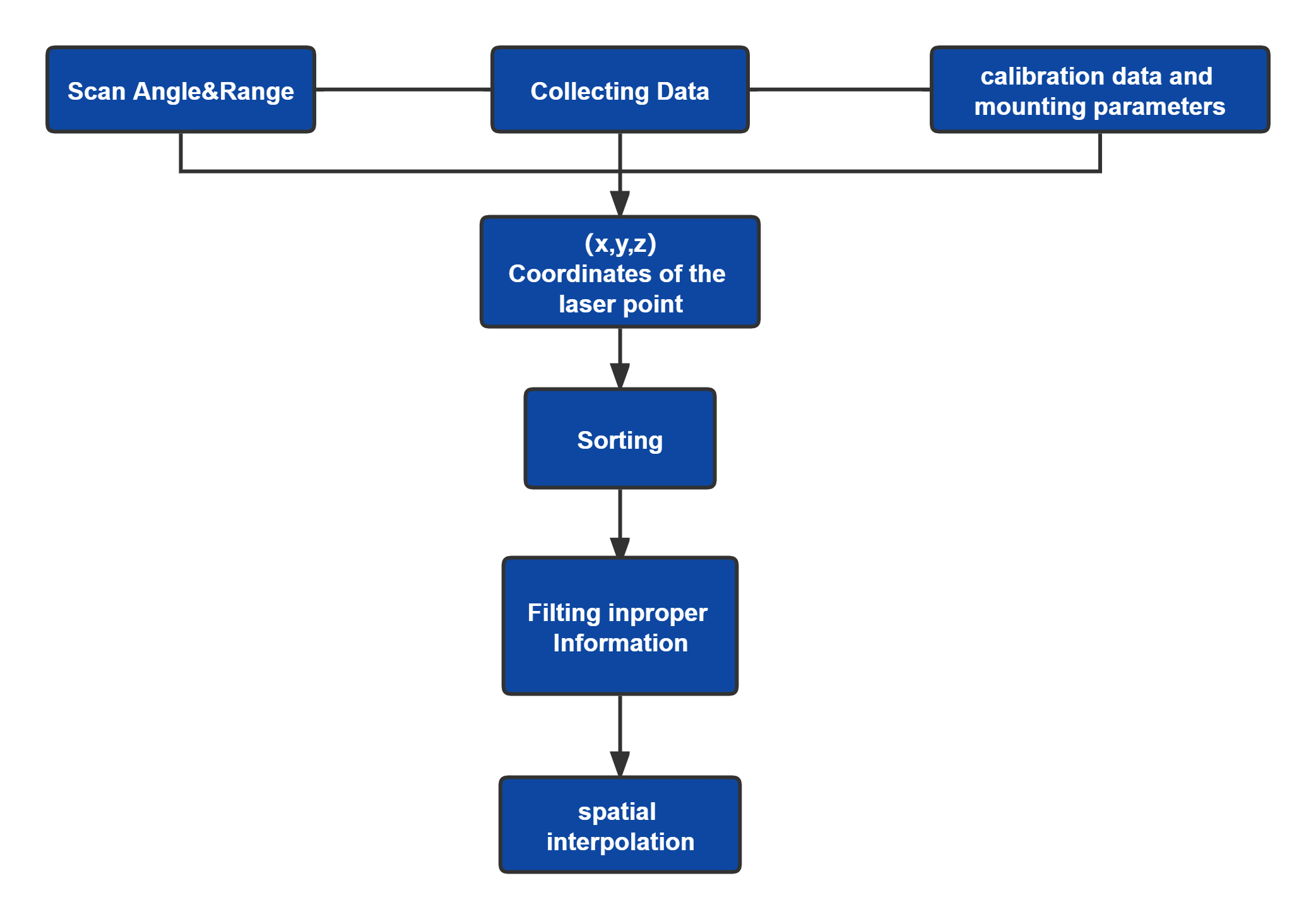
ਇਹ ਇੱਕ ਆਮ ਫਲੋਚਾਰਟ ਹੈ ਜੋ LiDAR ਵਰਤੋਂ ਦੌਰਾਨ ਪੁਆਇੰਟ ਡੇਟਾ ਪ੍ਰੋਸੈਸਿੰਗ ਦੇ ਮੁੱਖ ਕਦਮਾਂ ਨੂੰ ਦਰਸਾਉਂਦਾ ਹੈ। (x, y, z) ਕੋਆਰਡੀਨੇਟਸ ਨੂੰ ਇਕੱਠਾ ਕਰਨ ਤੋਂ ਬਾਅਦ, ਇਹਨਾਂ ਬਿੰਦੂਆਂ ਨੂੰ ਛਾਂਟਣਾ ਡੇਟਾ ਰੈਂਡਰਿੰਗ ਅਤੇ ਪ੍ਰੋਸੈਸਿੰਗ ਦੀ ਕੁਸ਼ਲਤਾ ਵਿੱਚ ਸੁਧਾਰ ਕਰ ਸਕਦਾ ਹੈ। LiDAR ਪੁਆਇੰਟਾਂ ਦੀ ਜਿਓਮੈਟ੍ਰਿਕ ਪ੍ਰੋਸੈਸਿੰਗ ਤੋਂ ਇਲਾਵਾ, LiDAR ਫੀਡਬੈਕ ਤੋਂ ਤੀਬਰਤਾ ਦੀ ਜਾਣਕਾਰੀ ਵੀ ਉਪਯੋਗੀ ਹੈ।
ਸਾਰੀਆਂ ਰਿਮੋਟ ਸੈਂਸਿੰਗ ਅਤੇ ਮੈਪਿੰਗ ਐਪਲੀਕੇਸ਼ਨਾਂ ਵਿੱਚ, LiDAR ਦਾ ਸੂਰਜ ਦੀ ਰੌਸ਼ਨੀ ਅਤੇ ਹੋਰ ਮੌਸਮੀ ਪ੍ਰਭਾਵਾਂ ਤੋਂ ਸੁਤੰਤਰ ਵਧੇਰੇ ਸਹੀ ਮਾਪ ਪ੍ਰਾਪਤ ਕਰਨ ਦਾ ਵੱਖਰਾ ਫਾਇਦਾ ਹੈ। ਇੱਕ ਆਮ ਰਿਮੋਟ ਸੈਂਸਿੰਗ ਸਿਸਟਮ ਵਿੱਚ ਦੋ ਹਿੱਸੇ ਹੁੰਦੇ ਹਨ, ਇੱਕ ਲੇਜ਼ਰ ਰੇਂਜਫਾਈਂਡਰ ਅਤੇ ਸਥਿਤੀ ਲਈ ਇੱਕ ਮਾਪ ਸੂਚਕ, ਜੋ ਸਿੱਧੇ ਤੌਰ 'ਤੇ ਭੂਗੋਲਿਕ ਵਾਤਾਵਰਣ ਨੂੰ 3D ਵਿੱਚ ਜਿਓਮੈਟ੍ਰਿਕ ਵਿਗਾੜ ਦੇ ਬਿਨਾਂ ਮਾਪ ਸਕਦਾ ਹੈ ਕਿਉਂਕਿ ਕੋਈ ਇਮੇਜਿੰਗ ਸ਼ਾਮਲ ਨਹੀਂ ਹੈ (3D ਸੰਸਾਰ ਨੂੰ 2D ਜਹਾਜ਼ ਵਿੱਚ ਚਿੱਤਰਿਆ ਗਿਆ ਹੈ)।
ਸਾਡੇ ਲਿਡਰ ਸਰੋਤ ਦੇ ਕੁਝ
ਸੈਂਸਰ ਲਈ ਅੱਖ-ਸੁਰੱਖਿਅਤ LiDAR ਲੇਜ਼ਰ ਸਰੋਤ ਵਿਕਲਪ


